Spiking vs Linear Neuron Models - Pros and Cons
Neural models have trade offs with speed, efficiency of computation, and ease of use.
There are two major domains for neural models: Pattern recognition and computation, and robot control.
Spiking neurons have the following advantages:
There are two major domains for neural models: Pattern recognition and computation, and robot control.
Spiking neurons have the following advantages:
- Spikes that only occur once over many time ticks do not require getting memory into cache for the target neurons, and thus are computationally efficient.
- Spiking neurons can do bursts.
- Spiking neurons make triggering behavior in a robot simple to implement.
- Spiking Neural models are inherently forward additive, imply Neural Hiding, and subsumptive architectures.
- Subtle timing of spikes can result in information encoding by spike arrival times.
- Integration over several time ticks are required to get intermediate levels of activation.
- The math is more complex; Charge, Activation, Burst and other variables must be tracked.
- Fast response to intermediate levels of activation. Single tick response.
- Matches current Tensorflow style packages in some cases.
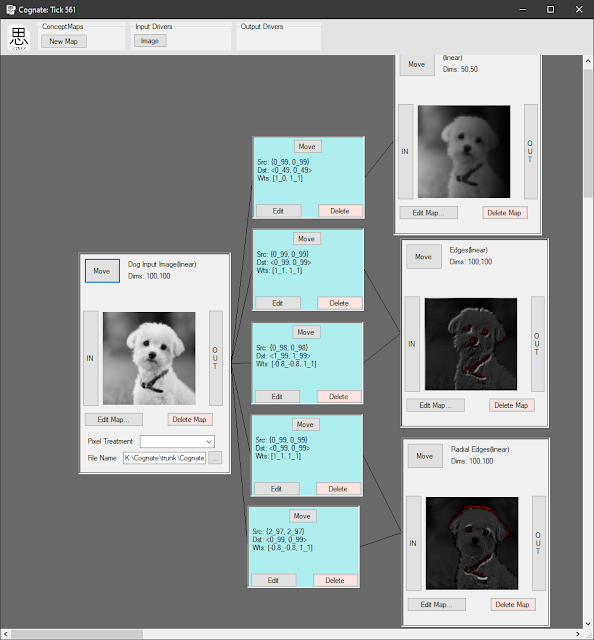
- Arbitrary transformation of one cluster (Concept Map) to another is straight forward. E.g. Detect edges with direct computation.
- Can be used in a subsumptive style.
- Can be implemented in tensor fashion for memory paging efficiency.
- Simple math and only need activation level.
- Somewhat higher level abstraction than Spiking neurons. A time tick can represent the integration over time of spiking neurons.
- Memory locality of reference can be poor. The reason the usual neural nets use tensors and GPU processing in orderly array.
- Poor at random and semi-random neuron webs.
- Poor it neural webs that are changing and evolving over time.
Linear Neuron models usually imply direct transfer of values forward along the neural net array, like in a Convolutional Neural Net. Another model is a sum forward being the implied style where a single 'layer' or Concept Map may have several inputs that may just sum in, or may be selected dynamically.
A mix of both of the above models my imply some spiking neurons for triggering style activation of circuits, and linear for fast analog response. In robots some inputs are inherently spiking such as touch sensors, while others may be more linear, such as a camera input.
Same for outputs.
Comments
Post a Comment